2024年5月,在由中国和柬埔寨举行的“金龙-2024”联合军演中,来自中国的武装机器狗引发各方广泛关注,其相关视频在社交平台上被大量转发和评论。而此次联合军演中首次参演的中国武装机器狗,本质上是背上安装有自动步枪的遥控四足机器人。
图1 武装机器狗(图源:央视新闻截图)
实际上,四足机器人并非新生事物,至今已经有长达60多年的研发历史。早在20世纪60年代,四足步行机器人的研发就已经起步。
近些年来,随着美国波士顿动力(Boston Dynamics)、瑞士ANYbotics以及国内的宇树科技、云深处科技、小米、腾讯、联想、OPPO等企业纷纷推出四足机器人产品,以及四足机器人在大型展会、赛事和演出上频频亮相,也逐渐将四足机器人带入到大众视野。
发展至今,四足机器人已成为当前机器人领域的热门细分赛道之一,且已在工业巡检、灾难救援、公共安防、负重运输、军事作战、科研教育、导游导览、娱乐表演、家庭陪伴等众多领域得到应用。本文将具体介绍和分析四足机器人的主要分类、典型应用及未来发展趋势。
01 备受关注,迅速发展的四足机器人毋庸置疑,四足机器人是近些年来备受关注的机器人类型之一。这具体表现在:
一是四足机器人赛道的入局者众多。入局者中,既有高校及科研院所,如斯坦福大学、意大利技术研究院(IIT)、韩国科学技术院(KAIST)、山东大学、浙江大学、国防科技大学、上海交通大学、哈尔滨工业大学、北京理工大学等;也包括专注于机器人研发的企业,如美国波士顿动力(Boston Dynamics),瑞士ANYbotics和Swiss-Mile,国内的宇树科技、云深处科技、追觅科技、优必选科技、蔚蓝科技、普渡科技、德鲁动力、七腾机器人、逐际动力、哈崎机器人、大象机器人等;还有来自互联网与消费电子、汽车等行业的跨界入局者,如索尼、腾讯、科大讯飞、联想、小米、OPPO、视源电子、小鹏鹏行(小鹏汽车生态企业)等。另外,日本川崎重工、日本三精科技株式会社、中国航天科工集团、中国兵器装备集团、中国电子科技集团等大型企业集团近年来也都推出了四足机器人产品。
二是四足机器人领域投融资事件持续活跃。据不完全统计,自2022年以来,已有小鹏鹏行、云深处科技、宇树科技、七腾机器人、蔚蓝智能科技、逐际动力等多家四足机器人企业获得融资。这其中,宇树科技作为国内四足机器人头部企业之一,在继2022年完成B轮亿元级融资后,又于2024年2月宣布完成近10亿元人民币B2轮融资。
三是四足机器人越来越贴近大众生活。近年来,四足机器人频频在央视春晚、北京冬奥会开幕式、杭州亚运会和亚残奥会、Super Bowl(素有“美国春晚”之称)等大型赛事和演出上“刷存在感”,也让四足机器人越来越多地走进人们的生活。

图2 四足机器人亮相北京冬奥会开幕式(图源:央视截图)
四足机器人在近年来备受关注且发展迅速,主要得益于四足机器人所具备的独特优势。四足机器人是一种模仿四足动物行走的仿生机器人,是足(腿)式机器人的重要分支之一。与双足机器人相比,四足机器人表现出更强的承载能力和稳定性;与六足机器人和八足机器人相比,四足机器人则拥有更简单的结构和控制系统。
而且,与常见的轮式机器人和履带式机器人更为擅长在较为平坦的表面上快速移动,但在穿越松软、崎岖不平的地形或遇到狭窄空间效率却大打折扣,甚至可能变得无法通行相比,四足机器人则越障能力强,更能适应各类复杂的地形(包括楼梯、台阶、沙地、林地、山丘及其它不平坦的表面),并能够保持身体的稳定性,具有较强的结构稳定性、较高的负重能力和灵活的机动能力。这些特点使得四足机器人在非结构化、存在不确定因素的复杂环境中更具有应用优势。
02 多种多样,四足机器人的主要分类四足机器人的分类多种多样。以下主要按照模仿的动物特征、驱动方式和控制方式进行分类介绍。
按照所模仿的动物特征来分,四足机器人可分为类狗四足机器人、类羊四足机器人、类马四足机器人、猎豹型四足机器人等。目前市面上的四足机器人大多都是模仿狗的特征,这是因为狗的四肢膝一致朝后,为腿部提供了更大的无碰撞工作空间,这种设计有助于“狗形”四足机器人完成上下楼任务。而且,狗的重心往往较低,低重心不仅可以提高机器狗在平地上行走时的平衡性和稳定性,还可以增强在崎岖地形上行走时的适应性和灵活性。此外,狗的步态多样而高效,可根据不同的速度和地形,采用不同的步态,比如行走、小跑和疾驰。机器狗可以通过模仿狗的步态,实现不同的移动模式,以适应不同的场景和需求,提高其效率和性能。
但是,四足机器人模仿的对象却并不仅仅局限于狗,也包括羊、马、猫、猎豹等四足动物,以满足特定场景及应用的需求。例如,在2022年日本东京国际机器人展会(iREX )上,川崎重工就展示了一款四足机器羊Bex,其命名和造型都源于生活在西亚和非洲山地的羱羊,可用于运载轻型货物、工厂巡检等。小鹏鹏行曾发布一款智能机器马,模仿的是小马的形态,可用于骑乘。大象机器人曾推出一款火星仿生猫MarsCat,能够独立完成走、跑、坐、伸懒腰、招手,以及标志性的蹭脸、埋猫砂等动作,主要作为电子宠物。美国麻省理工学院的科研团队则推出了名为迷你猎豹(Mini Cheetah)的猎豹型四足机器人,奔跑速度非常快。

图3 不同形态的四足机器人
按驱动方式,四足机器人可分为液压驱动四足机器人、电力驱动四足机器人、气动驱动四足机器人等。
其中,液压驱动四足机器人采用液压系统作为动力源,具有强大的驱动力和较高的负载能力。例如,波士顿动力的Spot Mini就是典型的液压驱动四足机器人,它通过先进的液压系统实现复杂的动作和良好的地形适应能力。液压四足机器人依靠其落足点离散,实现对地形的灵活适应性的优势,广泛应用于地形勘探、武器装备、物资运输等领域。
电动四足机器人使用电动机作为动力源,通常具有结构简单、维护方便和噪音低等特点,在能耗和环保方面表现较好,适合在需要低噪音和低排放的环境中工作。例如,小米公司推出的四足仿生机器人CyberDog和CyberDog2,就是电力驱动的四足机器人。
气动驱动四足机器人具有制造成本低、设计轻、灵活性好优点,但却面临控制精度低等挑战,使其难以实现高精度控制和低能耗。鉴于四足机器人应用场景复杂,对高动态响应和精度的需求高,且气动四足机器人具有低阻抗特点,在行走过程中容易出现不必要的振荡行为,目前气动四足机器人还处于研究阶段,应用尚未普及。
此外,也有混合动力驱动的四足机器人。例如,意大利技术研究院的动态腿足系统实验室(Dynamic Legged Systems,DLS)开发的HyQ系列,是电液混合动力驱动的四足机器人。
按照控制方式分类,四足机器人可分为自主控制四足机器人和遥控操作四足机器人。自主控制四足机器人配备了高级的传感器和控制系统,能够实现自主导航、环境感知和动态决策,可以在没有人为干预的情况下独立完成任务。遥控操作四足机器人通过人工遥控的方式进行操作,通常用于探测、救援等需要实时人为判断的场景,依赖于操作者的指令来完成具体的动作。
03 潜力巨大,四足机器人的典型应用凭借越障能力强,适应各类复杂的地形,具有较强的结构稳定性、较高的负重能力和灵活的机动能力等优势,四足机器人在工业领域应用潜力巨大。目前,四足机器人在工业领域的典型应用包括工厂巡检、电力巡检、金属冶炼巡检以及物流运输等,而且未来也有望扩展到石油化工巡检、天然气管道巡检、煤矿勘探等场景。
工厂巡检:四足机器人能够在高温或高压的有毒有害环境中进行全自动化巡检,减少人员安全威胁,降低人力成本和减少人为误差;能够利用智慧化巡检模块及技术,采集相关数据上传至后台进行分析处理,实现全自主智慧一体巡检。例如,在韩国,某工厂与云深处科技达成合作,其生产线管理项目将采用云深处四足机器人进行产线表计识别、托盘搬运、零件夹取。
电力巡检:四足机器人通过搭载智能传感器、在线式声学成像仪、操作机械臂等先进设备,可代替或辅助巡检人员完成诸如变电站、风电场、光伏电站、水电站、核电站、电力管廊地下空间以及其他重要场所的巡检作业,在提高巡检效率的同时,也能降低操作风险。
例如,宇树科技、云深处科技等四足机器人厂商携手福禄克公司推出了四足机器人智能巡检解决方案,可代替巡检人员进入密闭空间或危险环境进行巡检和搜寻,快速完成对设备的检测,解决运维难题,提高巡检频率,并降低风险。在2022杭州亚运会和亚残运会举办期间,云深处科技的绝影X20四足机器人就在亚运村地下8米电力管廊深处守护亚运村的供电安全。

金属冶炼巡检:在钢铁冶炼流程中,有数量庞大的原料皮带机通廊,这些地方巡检作业强度大,工况较恶劣危险,不仅狭窄崎岖,粉尘巨大,而且路面泥泞湿滑,多管缆、多障碍,人员作业有安全事故风险。而四足机器人则能在这些复杂环境实现无人巡检勘察,大幅度减少人工巡检安全风险,能够全天候作业,提高巡检效率,提前预防设备故障;并能够不间断收集巡检数据,覆盖巡检死角盲区。而且,高准确率的数据分析报告也能够为管理人员提供决策支持,减少生产过程安全事故发生。据媒体报道,宝钢股份中央研究院成功研发了首台套通廊四足巡检机器人第一代样机,并已在宝山基地运输部码头原料进厂中心和炼铁厂原料工场上线实战测试。

图5 宝钢股份中央研究院研发的首台套通廊四足巡检机器人第一代样机
(图源:钱江晚报)
物流运输:四足机器人可以在复杂的环境下运输货物,提高物流效率和安全性,减少人工成本和风险,特别是在需要在不平坦或崎岖的地形上移动时;而且通过加装机械臂,也能实现开关门、拾取重物等动作。意大利技术研究院(IIT)曾发布一段视频,视频中其四足机器人HyQReal自重只有130公斤,却能拉动重达3.3吨的飞机,这也充分体了四足机器人的负重能力。而且,在杭州亚运会上,四足机器人出现在铁饼赛场,用于将铁饼从落点搬运到靠近场边的指定位置。而这种灵活的搬运能力,也可以复制到工业场景之中。
图6 130公斤的四足机器人HyQReal拖动3吨多重的飞机
(图源:意大利技术研究院)
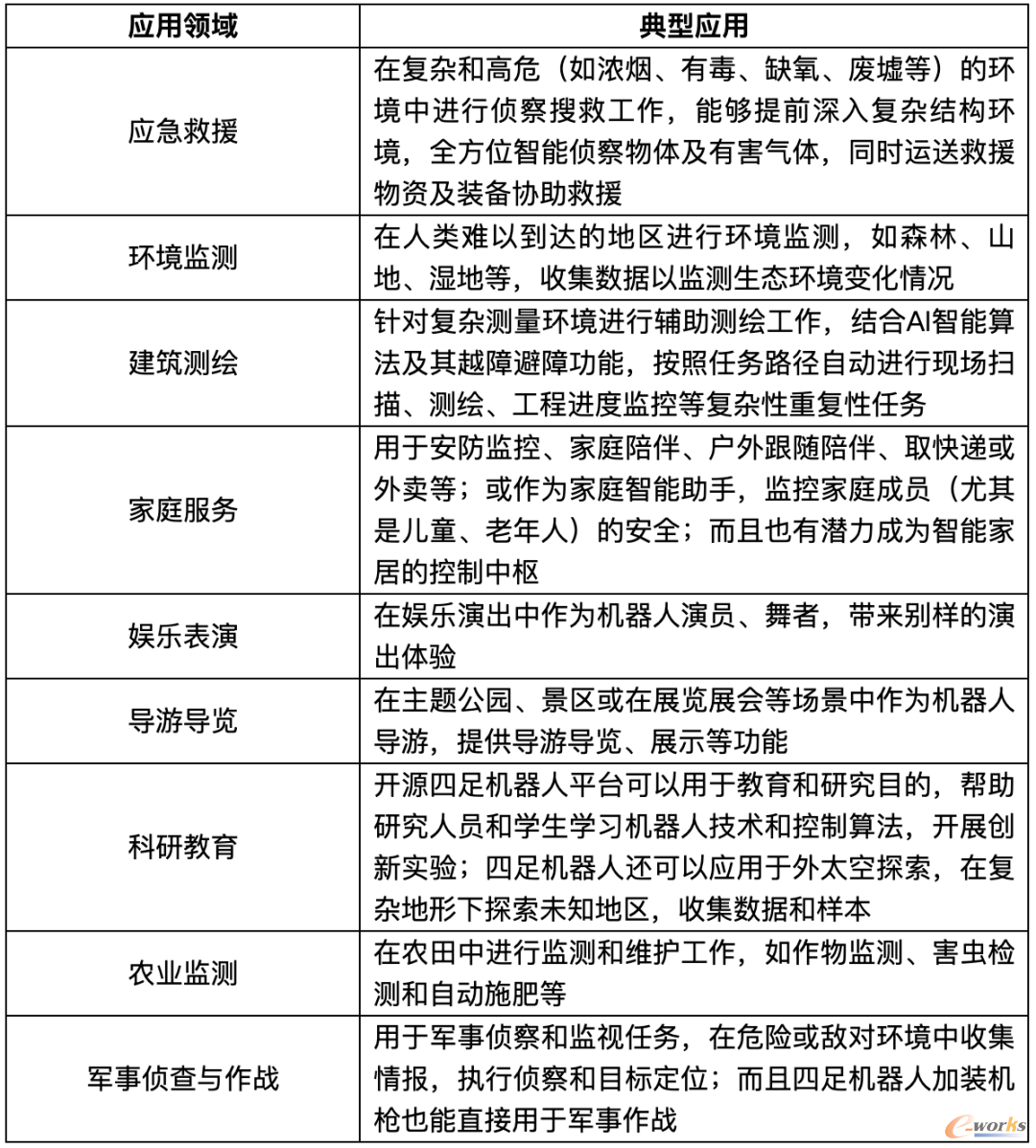
除了在工业领域,四足机器人在应急救援、环境监测、建筑测绘、家庭服务、导游导览、农业监测、军事作战等其它领域同样也拥有巨大的应用潜力。
表1 四足机器人在其它领域的应用
随着四足机器人越来越受到关注,且应用也不断丰富,越来越多的科研团队也加入对四足机器人的研究,这也推动四足机器人领域的发展日新月异。展望未来,四足机器人的研究和发展方向主要在于:通过轮足复合式的腿结构设计,实现更丰富和复杂的应用;多技术融合增强四足机器人的智能化、自主化能力;开源项目推动四足机器人技术持续进步。
1. 轮足结合,实现更丰富和复杂的应用
轮足结合就是将轮式和足式结构相结合,使得四足机器人具备实时地形感知与全地形移动能力,既解决了足式机器人速度低、效率低以及轮式机器人难以适应复杂地面环境的问题,也使得四足机器人能够实现更加丰富和复杂的应用。当前,轮足复合式的腿部结构设计是四足机器人厂商的研究重点之一。
例如,川崎重工推出的四足机器人Bex就采用了轮足复合结构,在膝盖处安装了轮子,在崎岖不平的地形上时可借由足式结构实现全向移动,而在光滑的平面上时则可借助轮子快速移动。在应用上,四足机器人Bex既可以运载轻型货物,用于在建筑工地运输材料,或在农场运输农作物;也可以用于工厂巡检,通过其自身配备的相机来检查仪器的运行状态。而且,据介绍,川崎研发团队将重点关注其下半身的混合移动系统,并将其打造成一个开放应用的工具。

图7 采用轮足复合结构的四足机器人Bex
腾讯Robotics X 实验室自研的四足机器人Max融合了足式与轮式运动模态,可以灵活切换,在崎岖路面走得稳,在平坦路面跑得快,更契合人类社会的现实环境。此外,逐际动力全自研的四轮足机器人W1,把腿式和轮式结构的优势结合于一身,配置多款自研高性能关节,实现了实时地形感知与全地形移动能力,大幅提高足式机器人的作业能力。
图8 腾讯四足机器人Max(图源:腾讯)
此外,值得一提的是,实现仿生四足与履带式结构双优势结合、可灵活切换行进方式的履带四足复合机器人,也有相关研究团队正在开发和研究之中。
2.多技术融合增强智能化、自主化能力
通过整合包括计算机视觉、自动控制、人工智能、步态规划和能源供应等多方面技术,能够增强四足机器人的智能化、自主化能力,使得四足机器人可在各种复杂环境中进行高效地自主导航和动态避障。因此,多技术融合也是当前四足机器人的重点研究和发展方向之一。
例如,宇树科技推出的Unitree B2四足机器人通过配备多种传感器,如3D激光雷达、深度相机和光学相机等,实现了更高水平的感知能力,能够更好地理解和适应周围环境;同时支持快速更换电池、智能自主充电。多种技术的融合,也使得Unitree B2可广泛应用于工厂巡检、电力巡检、应急救援等场景。波士顿动力通过使用ChatGPT以及一些开源的大语言模型训练其Spot四足机器人,使得Spot化身为“导游”,可以与人进行交流,并具有视觉问答能力,可以分析图像并回答问题。
3.开源开放推动四足机器人技术持续进步
开源开放是推动技术创新的重要手段。在技术层面上,四足机器人集成了动力系统部件的仿生结构设计、环境感知技术、自主控制技术、运动规划、运动控制、SLAM等多种技术,非常适合二次开发,解锁更多功能,实现特殊应用需求。而通过开放共创,则更能推动四足机器人的技术进步和应用拓展。
此前,美国麻省理工学院(MIT)的Min cheetah四足机器人从硬件到软件全开源,就很好地推动了四足机器人的技术创新和产业协作,使得越来越多的研发团队参与到四足机器人产品的研发和产业化。而且,近年来包括纽约大学、百度、宇树科技等通过开源自身在四足机器人领域的相关研究成果,同样也推动了四足机器人的技术进步和产业发展。可以预见,随着越来越多的研究团队基于开源共创模式进行研究创新,四足机器人的技术与产业发展也将迈上新的台阶。
05 结语在科幻电影《流浪地球2》中,四足机器人“笨笨”凭借其生动可爱的形象圈粉无数。电影中的“笨笨”拥有在外太空、海底等极端环境下运输、勘测、躲避等能力,平时卖萌憨态可掬,关键时刻又能挺身而出救助主人。尽管“笨笨”只是电影中虚拟出来的角色,但随着技术及应用的发展,科幻正在照进现实。如今,现实世界中的四足机器人已经与“笨笨”非常接近,并已成为人类生产生活的得力助手。我们也期待四足机器人在未来将在更多领域发挥更加重要的作用。
参考资料:
[1] 四足步行机器人研究现状及展望
https://www.doc88.com/p-5495002366805.html
[2] 四足综述(一)四足机器人发展现状
https://mp.weixin.qq.com/s/BcbIVIBP4Ow9yJlGwnEJOQ
[3] 智说科普(二)四足智能机器狗的“前世今生”
https://mp.weixin.qq.com/s/OLnXhF4Y73C1n6pB_n-sDg
[4] Review of Quadruped Robots: Structure, Control, and Autonomous Motion
https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202300783
[5] 为什么四足机器人总设计成狗的样子?
https://mp.weixin.qq.com/s/UGNFDDTxkq-_w6xoNymHIA
[6] 中国四足机器人都是“笨狗”?没那么简单
https://mp.weixin.qq.com/s/nAhqoMFl2jmtex3oOz--NQ
[7] 波士顿动力机器狗能开口聊天了!ChatGPT加持,对话机智妙语连珠
https://mp.weixin.qq.com/s/LK0156UtTN0h2GrtZVqPng
